Physical Address
Gujarat, India
Physical Address
Gujarat, India

Discover Honda’s P-Series robots P1, P2, P3 & P4 —trailblazing humanoids that laid the foundation for modern robotics. Learn about their inception, groundbreaking technologies, and lasting impact in this comprehensive blog!
Robot Name: P Series (P1, P2, P3, P4)
Company / Institute: Honda
Location: Japan
Inception: 1993
End: 2000
Sensors: Visual Sensors (Cameras), Gyroscope Sensors, Floor Surface Sensors, Joint Angle Sensors
Skills: Walking, climbing stairs, navigating uneven terrain, basic object manipulation, balance control
Industry: Robotics Research & Development
Programming Languages: C++, Embedded C
Commercial availability: Not available commercially, used for R&D
Honda’s P-Series robots represent a crucial step in the evolution of humanoid robots. Developed between 1993 and 2000, the P-Series includes P1, P2, P3 and P4 models, each progressively refining Honda’s vision of a walking humanoid robot. These robots focused on achieving stable bipedal motion, laying the groundwork for later creations like ASIMO.
P-Series introduced advanced walking algorithms that enabled the robots to navigate uneven surfaces, climb stairs, and maintain balance in dynamic environments. Although they were never intended for commercial use, these robots became instrumental in demonstrating the feasibility of humanoid robots in both research and public showcases, propelling Honda into the spotlight of robotic innovation.
Images credits – Vanillase, CC BY-SA 3.0, via Wikimedia Commons
“The information in this blog is sourced from publicly available resources online.”
These series of Honda’s robots was preceded by E series and succeeded by one of the most popular humanoid robots ‘ASIMO’.
Technology:
The P-Series robots employed cutting-edge technologies for the time, including advanced gyroscopic systems for balance control and high-torque actuators for smooth joint movements. Vision sensors allowed basic environment recognition, while robust control algorithms enabled precise, human-like movements. Each iteration in the series reduced size and weight, making the robots more agile and practical for real-world applications.
Programming Language (s):
The P-Series robots were programmed primarily in C++ and Embedded C, allowing real-time control of sensors and actuators. The codebase focused on motion control algorithms, ensuring seamless interaction between sensors and motors for tasks like walking, running, and navigating obstacles.
Current use:
The P-Series robots are no longer in active use. However, they remain significant milestones displayed in Honda’s archives and showcased at robotics exhibitions to highlight the company’s technological journey. Their legacy lives on in ASIMO and Honda’s current robotics projects.
Specifications :
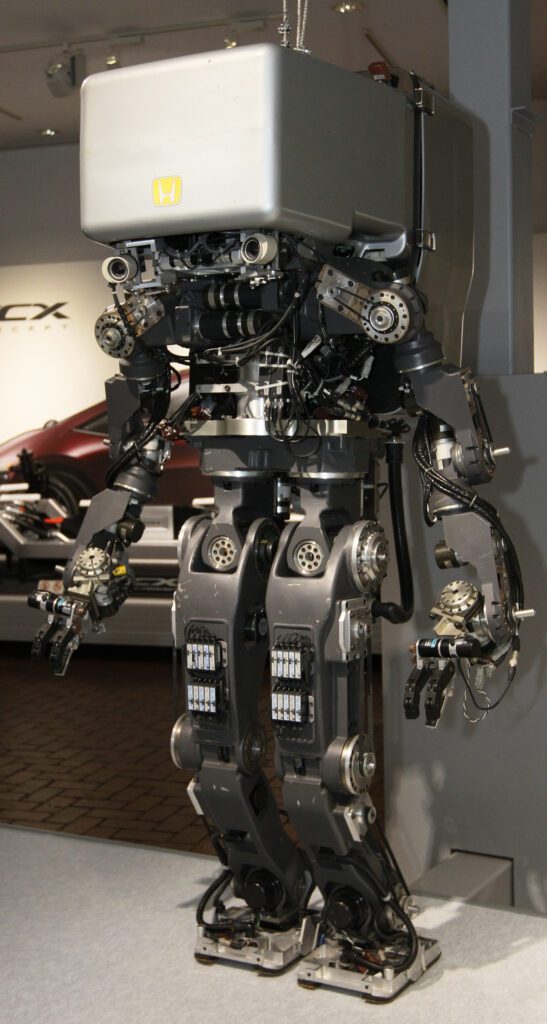
Honda P1 Model | Image credits : By Morio – Own work, CC BY-SA 3.0, Link

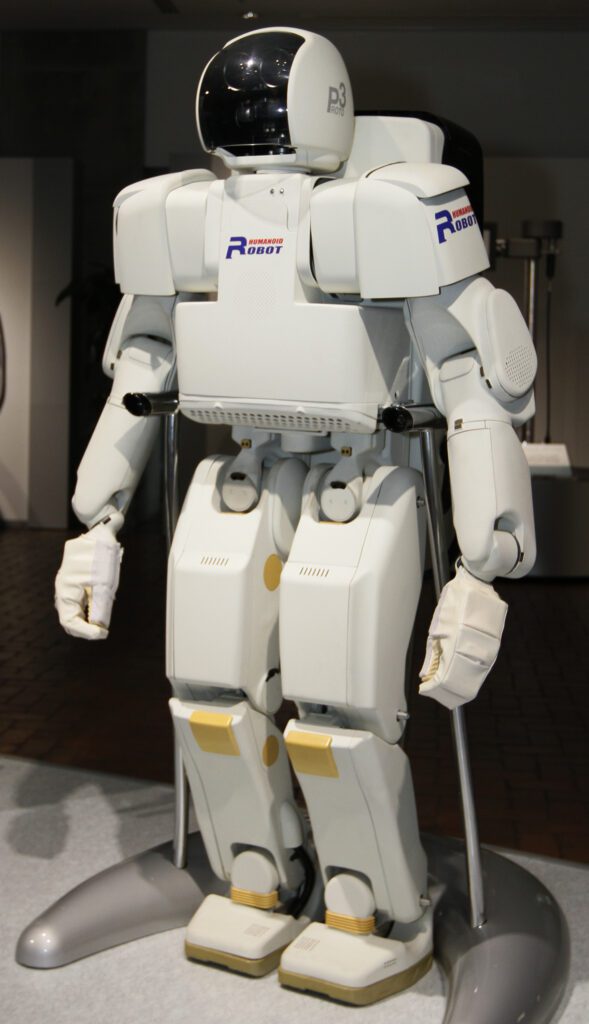
Honda P2 Model | Image Credits : By Morio – Own work, CC BY-SA 3.0, Link
Honda P3 Model | Image Credits : By Morio – Own work, CC BY-SA 3.0, Link
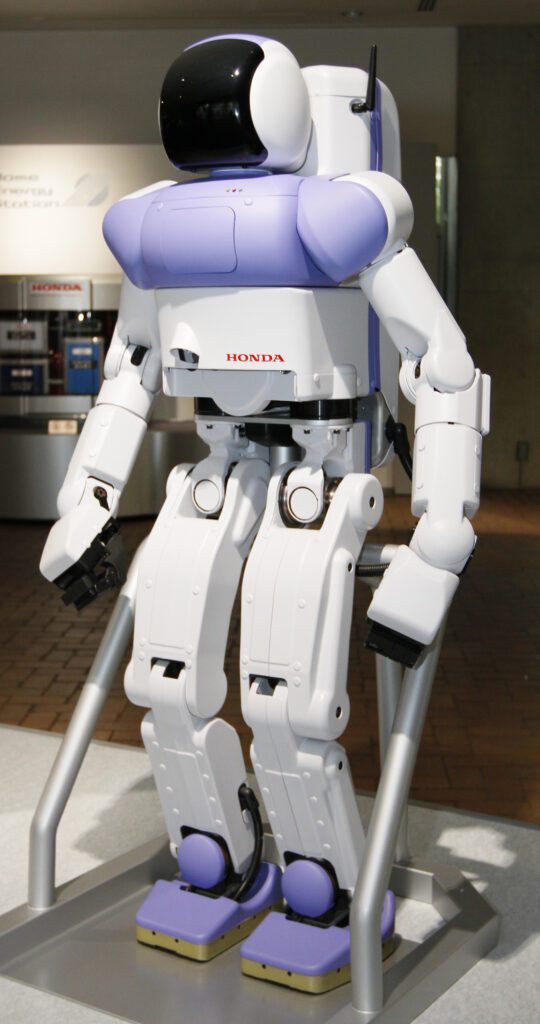
Honda P4 Model or P3 Improved prototype model | Image Credits : By Morio – Own work, CC BY-SA 3.0, Link
Boston Dynamics / Spot





{kind=link}
Leave a Reply